Continuing from my last blog post, the next question that it needs to be answered about learning classifier systems is rule discovery. As I mentioned, the LCS is a set of rules that each rule includes a Condition/ action parts. Explained in the book “Learning Classifier Systems”, random generation of rules can only match with smallest number of problems. The use of past experience to generate random rules is the most effective way to include poorly-understood environments.
The foundation of classifier systems is the set of rules. Generally, the condition part of a rule “looks for” certain condition of the environment, and action part specifies the message to be sent to the environment based on the condition part. “IF there is (a message from the detectors indicating) an object left of center in the field of vision, THEN (by issuing a message to the effectors) cause the eyes to look left.” In computer language, each rule is a message that is represented by a string of bits. Each bit is defined by 0, 1 or #, which is equivalent for true, false, and not care. The genetic algorithm mates these strings to create new rules. Explained by Richard J. Bauer’s book, Learning classifier systems are classified as a reinforcement learning (RL) method and defined in the following setting.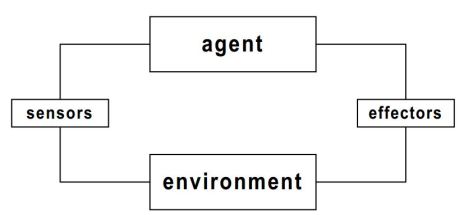
Although this method of RL has been working great to solve some basic problems but it encountered difficulties in complex environment. Probably that’s was new classifier systems were introduced over time (i.e. XCS, TCS, and etc). Check my next blog posts if you want to know more.
